
RLANRCによる歩行の相の定義
ランチョ・ロス・アミーゴ国立リハビリテーションセンター(RLANRC)は従来の定義とは異なる、新しい歩行の相分けを定義しました。
これにはイニシャル、ミッド、ターミナルと中立的な概念を用いており、また機能的に重要なタイミングや従来の表記では混乱を招いていてしまいやすい表記への対応など可能となりました。
現在では多くが、このランチョ・ロス・アミーゴ式を用いており、歩行分析のためのソフトウェアを開発しているメーカーもほとんどこの表記を使っています。
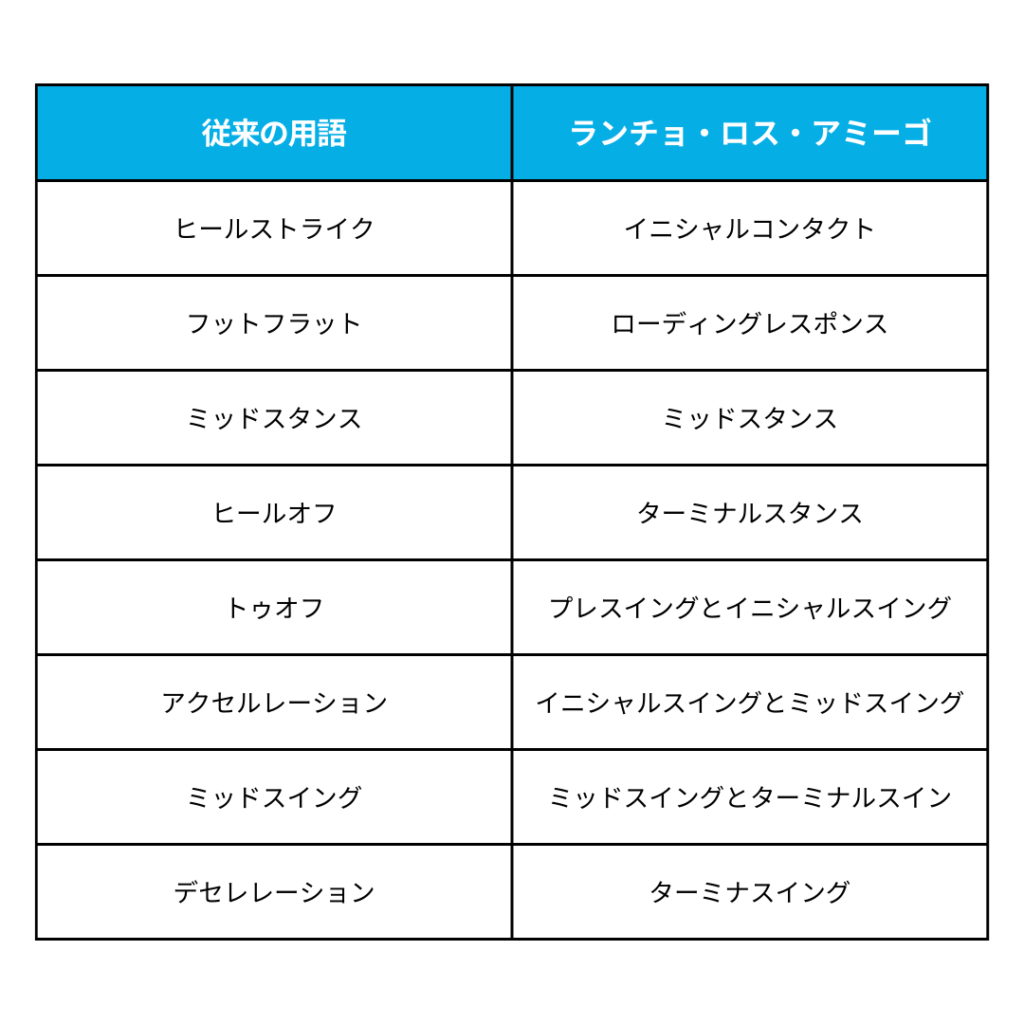
従来の用語とランチョ・ロス・アミーゴ式
歩行周期、歩幅、歩隔
歩行周期の概念
同側の初期接地から次の初期接地までの時間によって定義づけられています。これは繰り返される歩行要素の中でも最も明確に観察することができるためです。
ストライド、ステップ、歩隔
ストライドとステップは「距離」を表し、歩行周期は「時間」を表しています。
ストライドとステップは混同されやすいですが、図のように
- ストライド:踵接地地点から同側の踵接地地点まで
- ステップ:片足の踵接地地点から反対側踵接地地点まで
の距離となります。
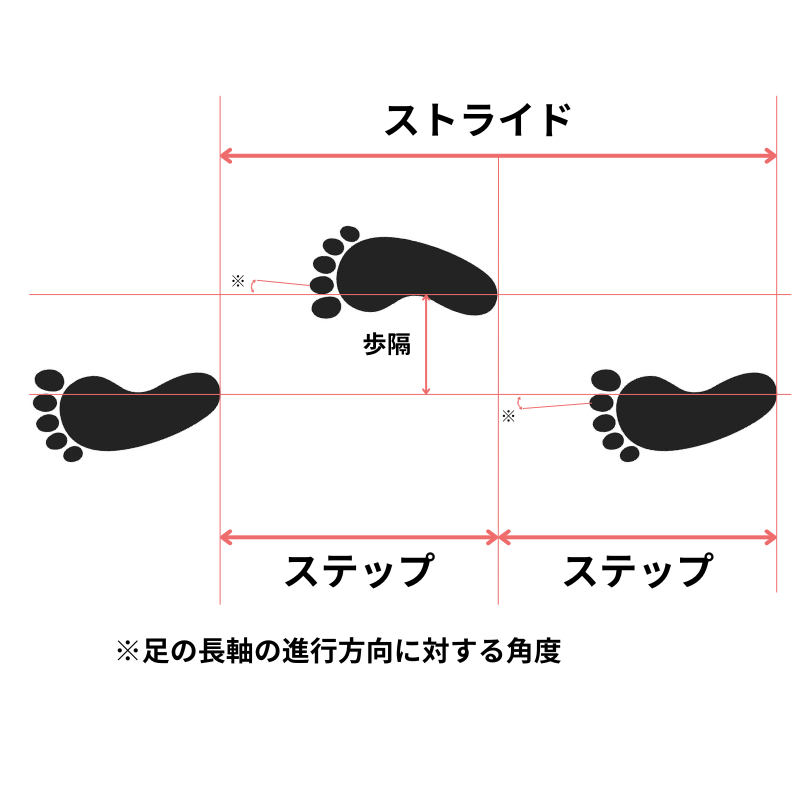
歩隔は左右の踵中心の間の幅であり、標準値は5〜13cmです。
足の長軸は進行方向に対して7°外旋しており、足の軽度外旋※(Toe upt angle)として見られます。
歩行周期の各相 それぞれの特徴と役割
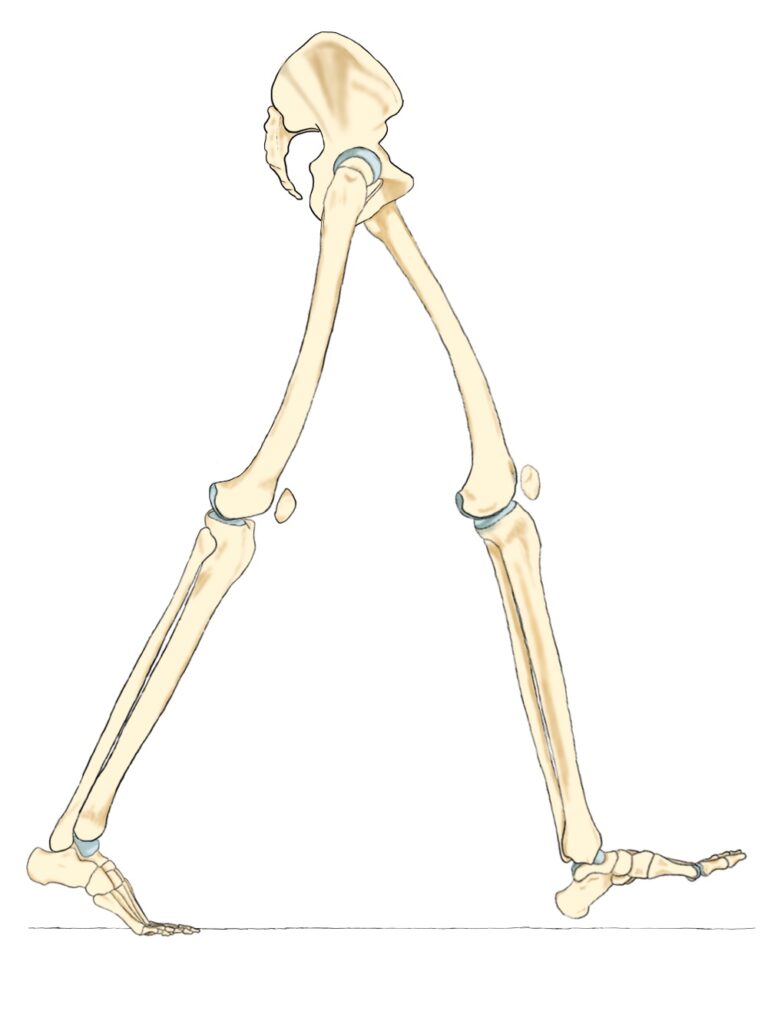
第1相 イニシャルコンタクト(IC:Inictial Contact)
- 0%
- 始まり
- 初期接地で始まる
- 終わり
- 反対側の脚が地面から離れた瞬間
- この相では体重が素早くほぼまっすぐに伸ばされた脚に移ってくる
- 1回目の両脚支持期 (initial double limb support : IDLS)
- 役割
- ヒールロッカーで始められる脚のポジションにしておく
第2相 ローディングレスポンス(LR:Loading Response)
- 0〜12%
- 始まり
- 反対側の脚が地面から離れた瞬間(toe off)
- 終わり
- 観察肢の踵から床から離れた瞬間
(身体重心は前足部の直上にある)
- 観察肢の踵から床から離れた瞬間
- 役割
- 衝撃吸収
- 荷重を受け継ぎつつ安定性の確保
- 前方への動きのキープ
第3相 ミッドスタンス(MSt:Mid Stance)
- 12〜31%
- 始まり
- 観察肢のつま先が床から離れた瞬間
- 終わり
- 両側の下腿が矢状面で交差した瞬間
- 役割
- しっかりと地についている足を支点とした前方への動き
- 脚と体幹の安定性の確保
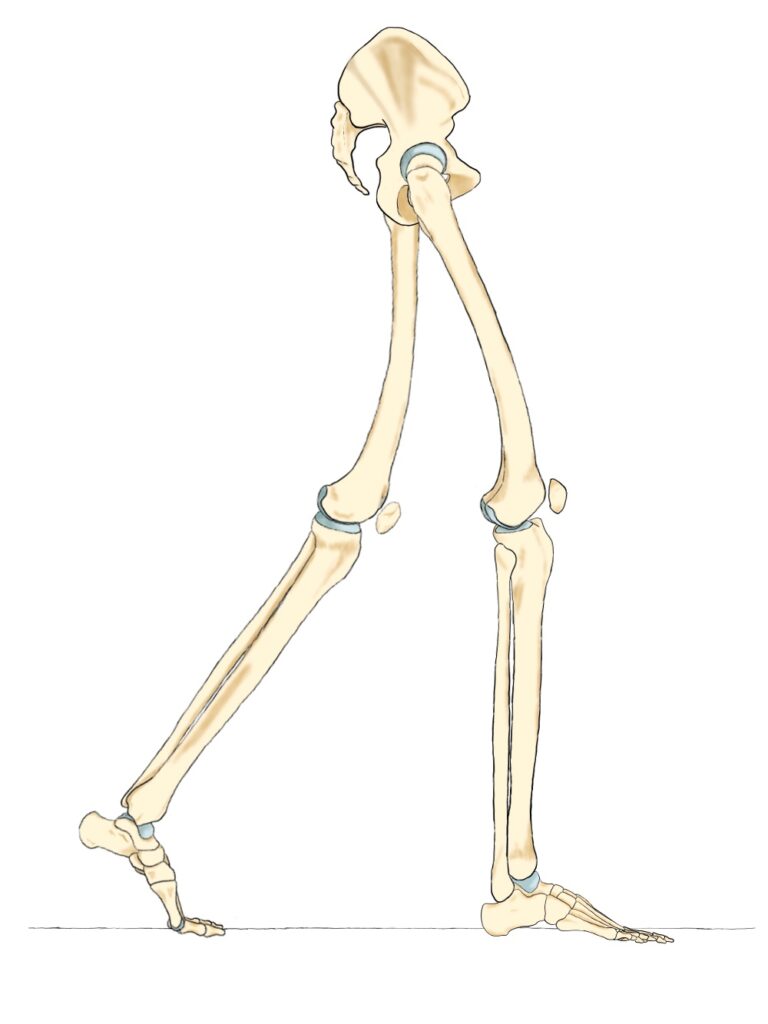
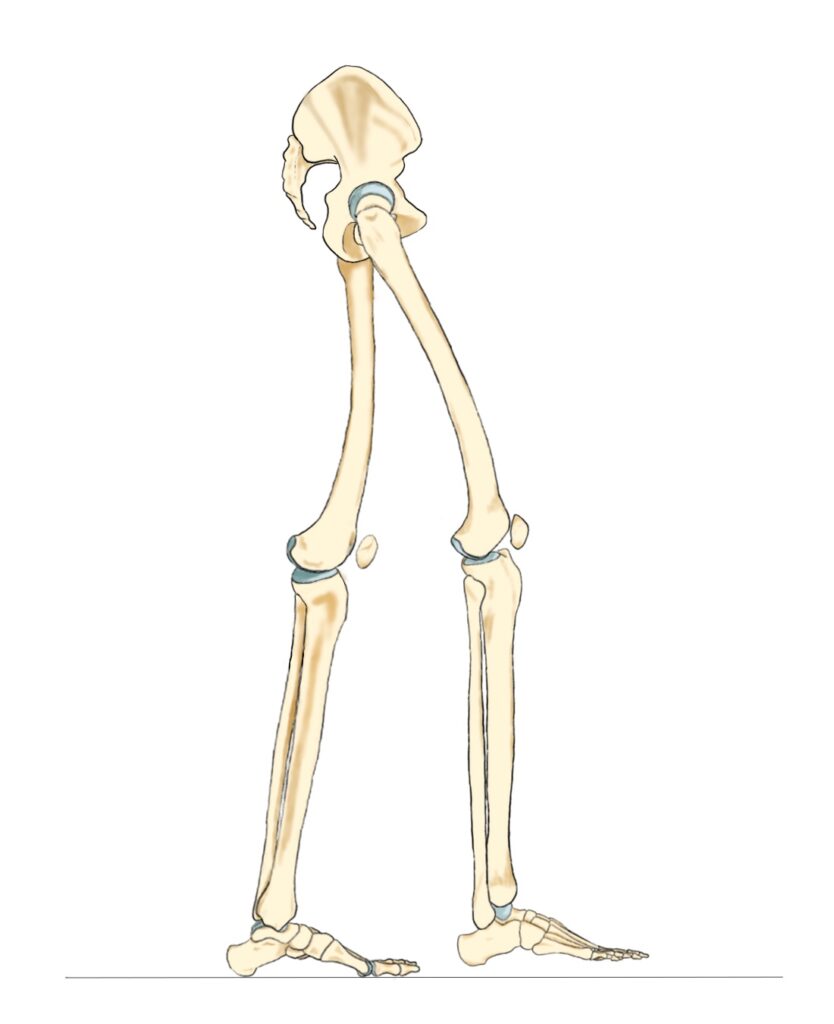
第4相 ターミナルスタンス(TSt:Terminal Stance)
- 31〜50%
- 始まり
- 観察肢の踵が床から離れた瞬間
- 終わり
- 反対側のイニシャルコンタクト
- この相の終わりとともに単脚支持期が終わる
- 役割
- 身体を支持足より前へ運ぶこと
第5相 プレスイング(PSw:Pre Swing)
- 50〜62%
- 始まり
- 反対側のイニシャルコンタクト
- 終わり
- 観察肢のつま先が床から離れた瞬間
- 2回目の両脚支持期 (terminal double limb support : TDLS)
- 役割
- 観察肢のイニシャルスウィングの準備
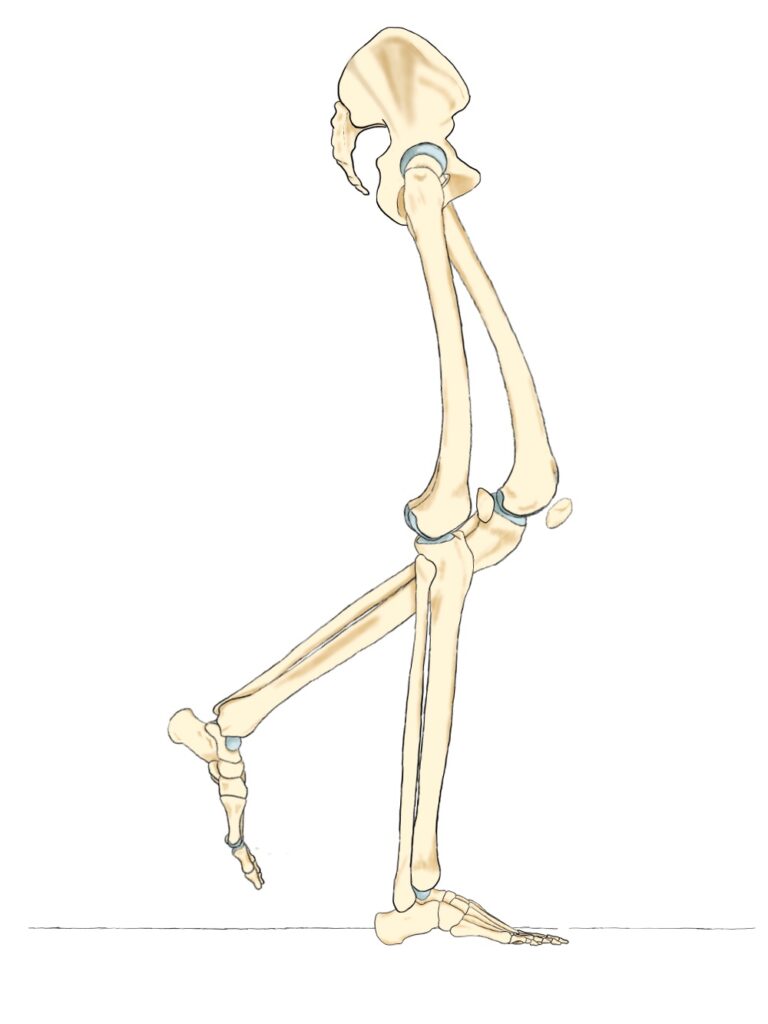
第6相 イニシャルスイング(ISw:Inictial Swing)
- 62〜75%
- 始まり
- 観察肢のつま先が床から離れた瞬間
- 終わり
- 両側の下腿が矢状面で交差した瞬間
- 役割
- 床から足を離すこと
- 観察肢を前に運ぶこと
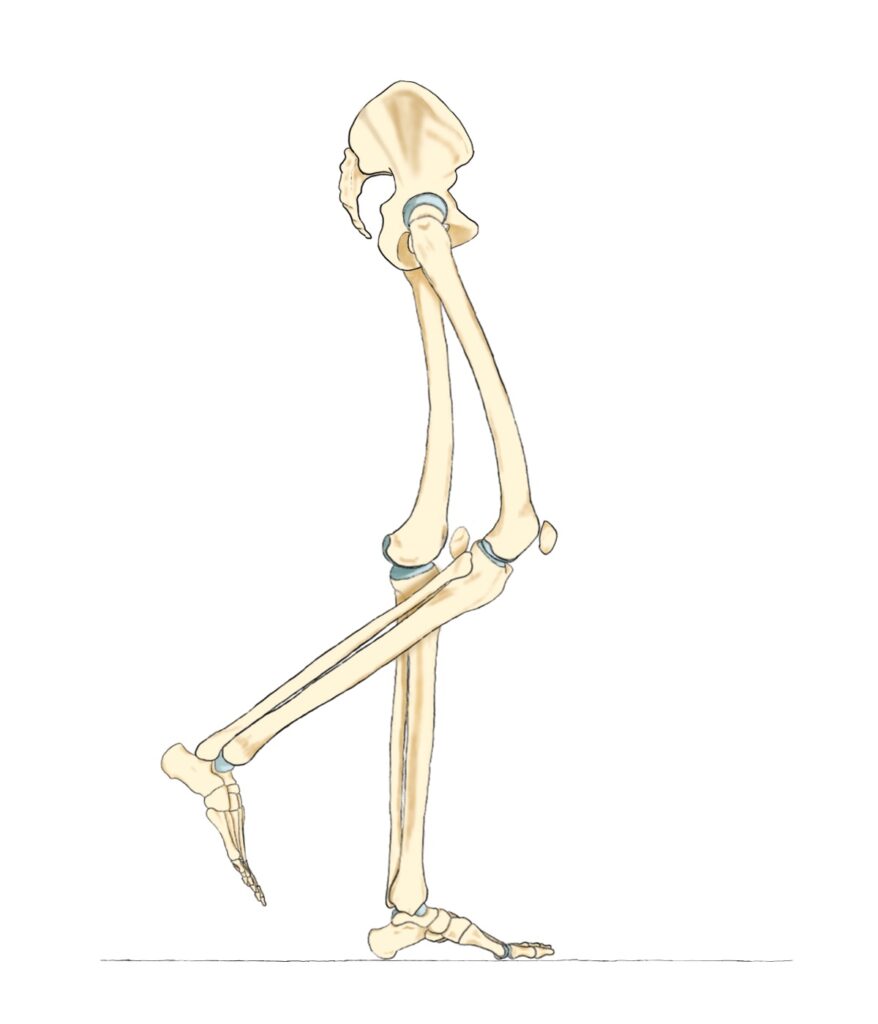
第7相 ミッドスイング(MSw:Mid Swing)
- 75〜87%
- 始まり
- 両側の下腿が矢状面で交差した瞬間
- 終わり
- 観察肢の下腿が床に対して直角になった瞬間
- 役割
- 観察肢を引き続き前方へ運ぶこと
- 観察肢の十分なトゥクリアランスの確保
第8相 ターミナルスイング(TSw:Terminal Swing)
- 87〜100%
- 始まり
- 観察肢の下腿が床に対して直角になった瞬間
- 終わり
- 観察肢の足が床に擦れた瞬間(イニシャルコンタクト)
- 役割
- 観察肢の立脚の準備
- 観察肢を前へ運ぶことの終了
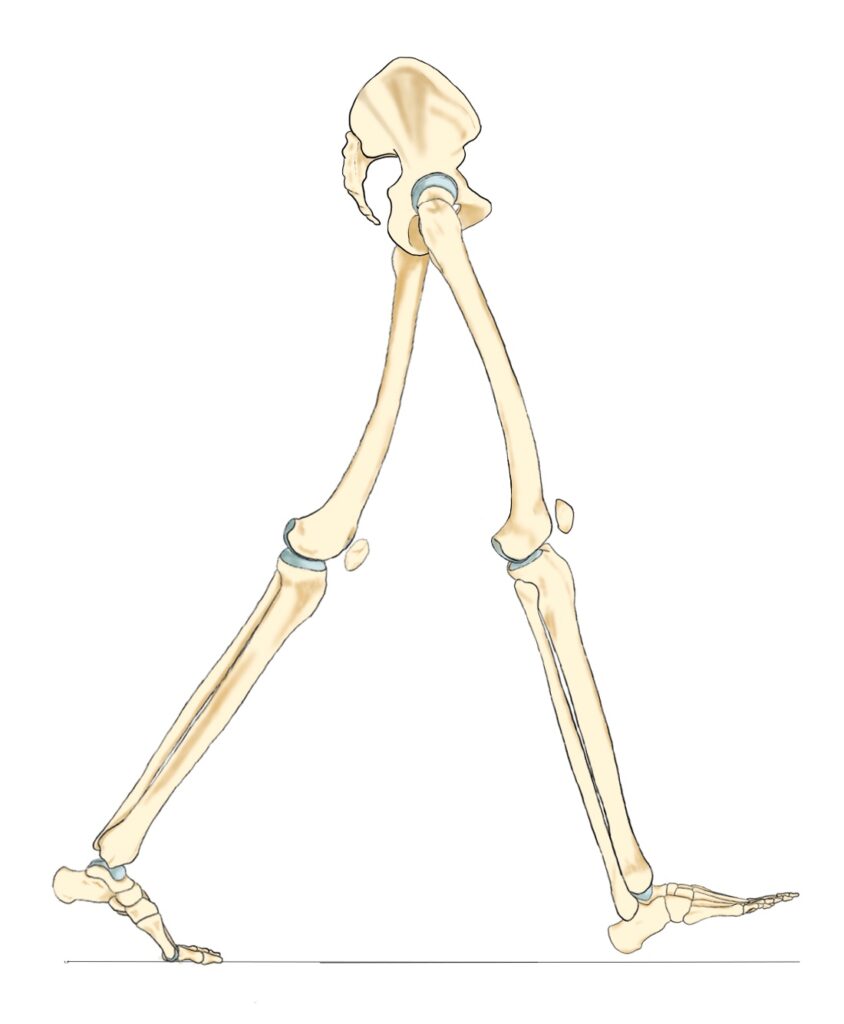
「正常な」歩幅の要因
正常な歩幅は7つの要因によって実現されます。
3つはターミナルスイング、4つはターミナルスタンスで出現します。
- ターミナルスイング
- 20°以下の股関節屈曲
- 5°以下の膝関節軽度屈曲
- 目視確認ではニュートラル0°
- 5°以下の骨盤前方回旋
- ターミナルスタンス (立脚肢、正常なターミナルスタンスのすべての要因)
- 足関節10°背屈
- 踵離れ
- 股関節20°伸展(トレイリングリム)
- 体幹の重心が前足部の支持面の直上から大きく離れて前にある状態
- つまり足が後ろに残って、股関節が無理やり前に出る状態
- TStにおける股関節の過伸展
- 約5°の骨盤後方回旋
歩行速度の平均
- 歩行速度
- 1.4m/secないし84m/minを平均としているところが多い
- ストライド長
- 左右の歩幅を合わせた長さで平均は約1.4m
- 「歩行した距離(m)×2/要した歩数」で算出が可能
- ケーデンス
- 1分間の歩数のことであり、平均は120steps/minだが、変動が大きく平均値は100~130steps/minである。
- 「数えた歩数×60/歩数の数え始めから数え終えた時間(sec)」で算出が可能
- 10秒以上歩ければ、100%正確ではないが十分に使える
まとめ
歩行は日常生活の中で当たり前に行われている動作ですが、その背後には非常に複雑で精緻なメカニズムが働いています。ランチョ・ロス・アミーゴ式の歩行解析は、そのメカニズムを理解し、リハビリテーションや治療の質を向上させるための強力なツールです。歩行に関する知識を深めることで、リハビリテーションの現場だけでなく、自身や家族の健康にも役立つことができます。この機会に、ぜひ歩行の仕組みに興味を持ち、さらなる理解を深めましょう。
参考文献

コメント